




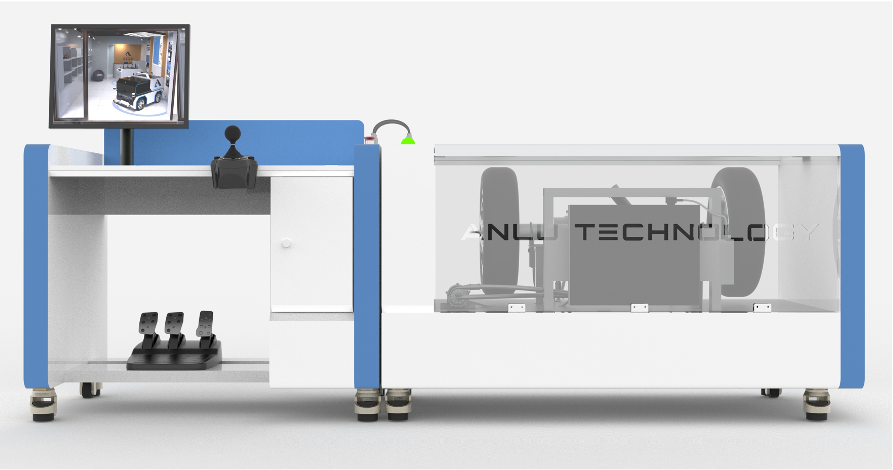
此套件包含转向控制器、转向电机、转向机构和轮胎等机械总成、操作面板、模拟方向盘等,可通过本台架实现对线控转向的故障模拟和调试、转向报文的熟悉以及转向相关的标定,进而让学生更细化的掌握线控转向技术,为后期研发更前沿的新能源车技术和自动驾驶技术奠定基础。


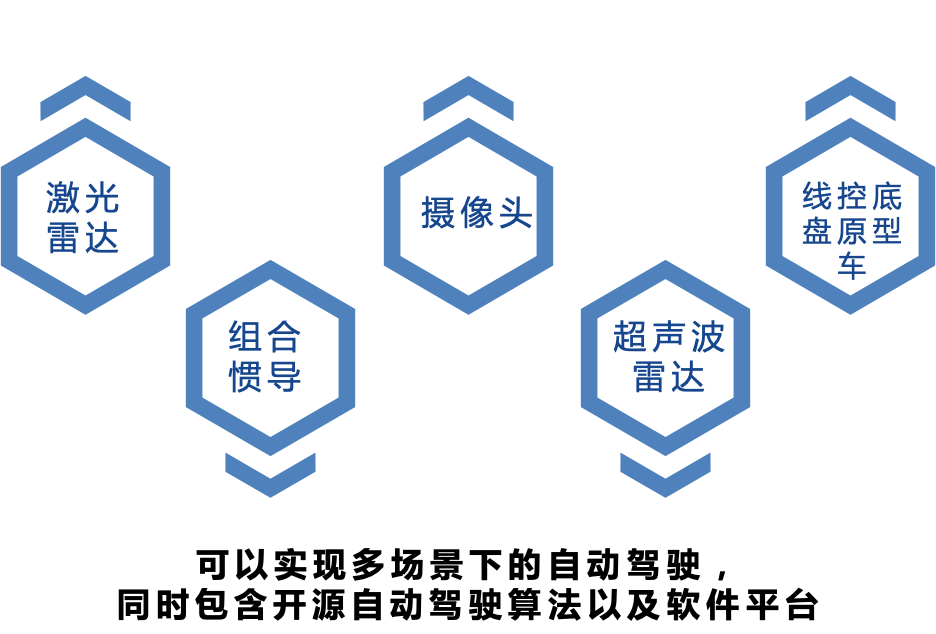
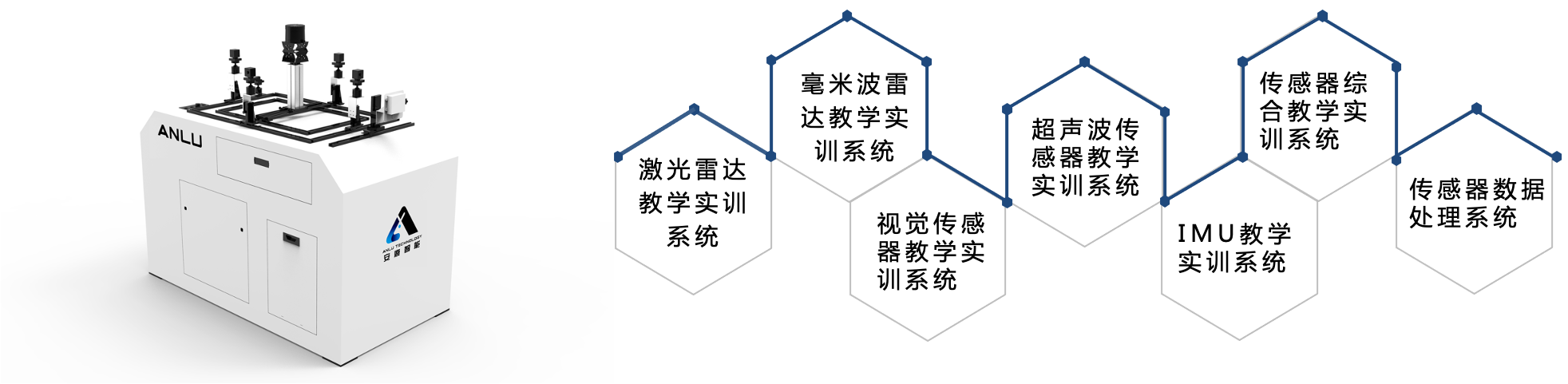
可实现自动驾驶基础传感器的入门学习以及传感器融合模拟
©版权所有 2018-2023 苏州英特模科技股份有限公司 苏ICP备18059130号-1
 苏公网安备 32058102001765号
苏公网安备 32058102001765号
ALZN-T-001:线控底盘原型车
包含智能网联技术对线控底盘最基本的线控要素